Controller de volet roulant Somfy RTS
Mon objectif sur ce projet est de pouvoir controler tous mes volets roulant depuis un seul et même appareil.
Dépôt GitHub : https://github.com/Zcool85/SomfyHome
Disclaimer : Les informations fournies ici sont à titre informatif uniquement. Elles ne constituent pas des conseils professionnels. Je ne peux pas garantir l’exactitude, l’exhaustivité, ou la pertinence des informations fournies. Je ne pourrais être tenu pour responsable de l’usage des informations de ce projet. Je ne pourrais en aucun cas être tenu responsable de tout domage direct, indirect, consécutif ou autre découlant de l’utilisation des informations de ce projet ou de toute information obtenue à partir de celui-ci.
Mon matériel Somfy
Je dispose de 8 volets roulant, chacun ayant leur propre télécommande “Centralis RTS”. De plus, je dispose d’une télécommande “Telis 4 RTS” générale, mais cette dernière est limitée au pilotage simultanée de 4 volets maximum.
Chaque volet roulant mémorise les télécommandes qui peuvent le piloter. Chaque volet roulant peut mémoriser jusqu’à 12 télécommandes.
Doc pour Centralis RTS.
Doc pour Telis 4 RTS.
Quelques docs contenant pas mal d’astuces :
- Enregistrer une télécommande Telis 4 RTS depuis des télécommandes individuelles
- Enregistrer une télécommande Telis 4 RTS depuis un point de commande Inis RT
- Aide au patamétrage
- Remplacer une Telis 4 sans autre télécommande
- Copier une Telis 4 RTS sur une nouvelle Telis 4 RTS
Doc pour désappairer une télécommande.
Choix du hardware
Pour ce projet, j’ai décidé d’utiliser un ESP32 pour pouvoir envisager d’utiliser mon réseau local pour, par la suite, pouvoir piloter les volets roulant depuis mon téléphone ou depuis internet.
Pour pouvoir communiquer avec les volets en RTS, j’ai décidé d’utiliser le module RFM69HCW (module qui semble le plus simple à utiliser pour ce type de projet). De plus, de nombreux projets utilisent ce type de module pour faire fonctionner leur propre volet roulant Somfy.
Bien entendu, ce projet me permettra de me familiariser avec les ESP32 et l’usage de leur outil de développement ESP-IDF.
Branchements
Voici le pinout du module RFM :
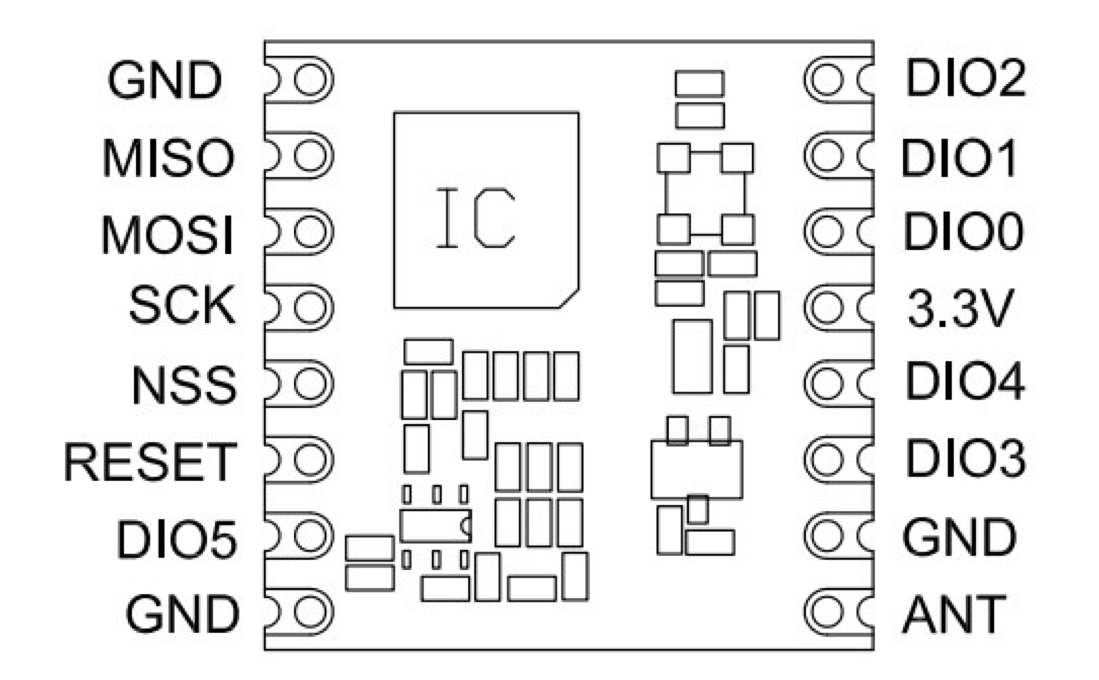 Brochage du module RFM68HCW
Brochage du module RFM68HCW
l’ESP32 que j’utilise pour le moment est une des première verison montée sur plaque de développement :
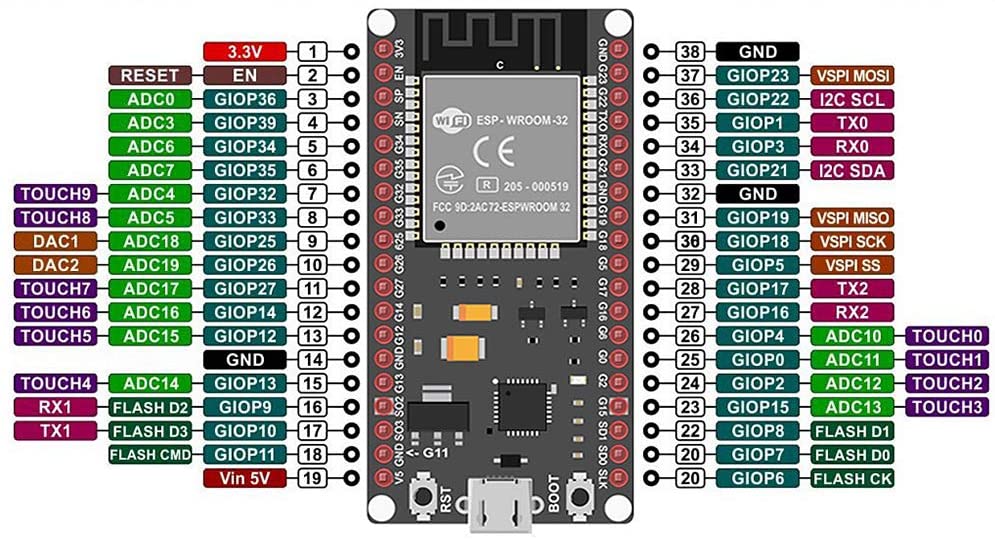 Brochage du module de dev ESP32
Brochage du module de dev ESP32
J’ai effectué le branchement suivant :
| Pin RFM69HCW | Pin ESP32 |
|---|---|
| MISO | 31 (GIOP19) |
| MOSI | 37 (GIOP23) |
| SCK | 30 (GIOP18) |
| NSS | 29 (GIOP5) |
| DIO2 | 23 (GIOP15) |
| RESET | 27 (GPIO16) |
L’usage de la broche RESET est facultatif. S’il n’est pas connecté à une broche de l’ESP, alors il faut la connecter à la masse (GND).
J’ai “bêtement” utilisé les broches du VSPI du module ESP32. Cela me permet d’utiliser le code par défaut fourni par Espressif pour gérer le protocol SPI avec le module ESP32.
J’ai placé un condensateur de 0.1uF entre les broches 3.3V et GND du module RFM69HCW comme préconisé dans la datasheet.
J’ai directement utilisé l’alimentation 3.3V du kit de dev ESP32 pour alimenter le RFM69HCW.
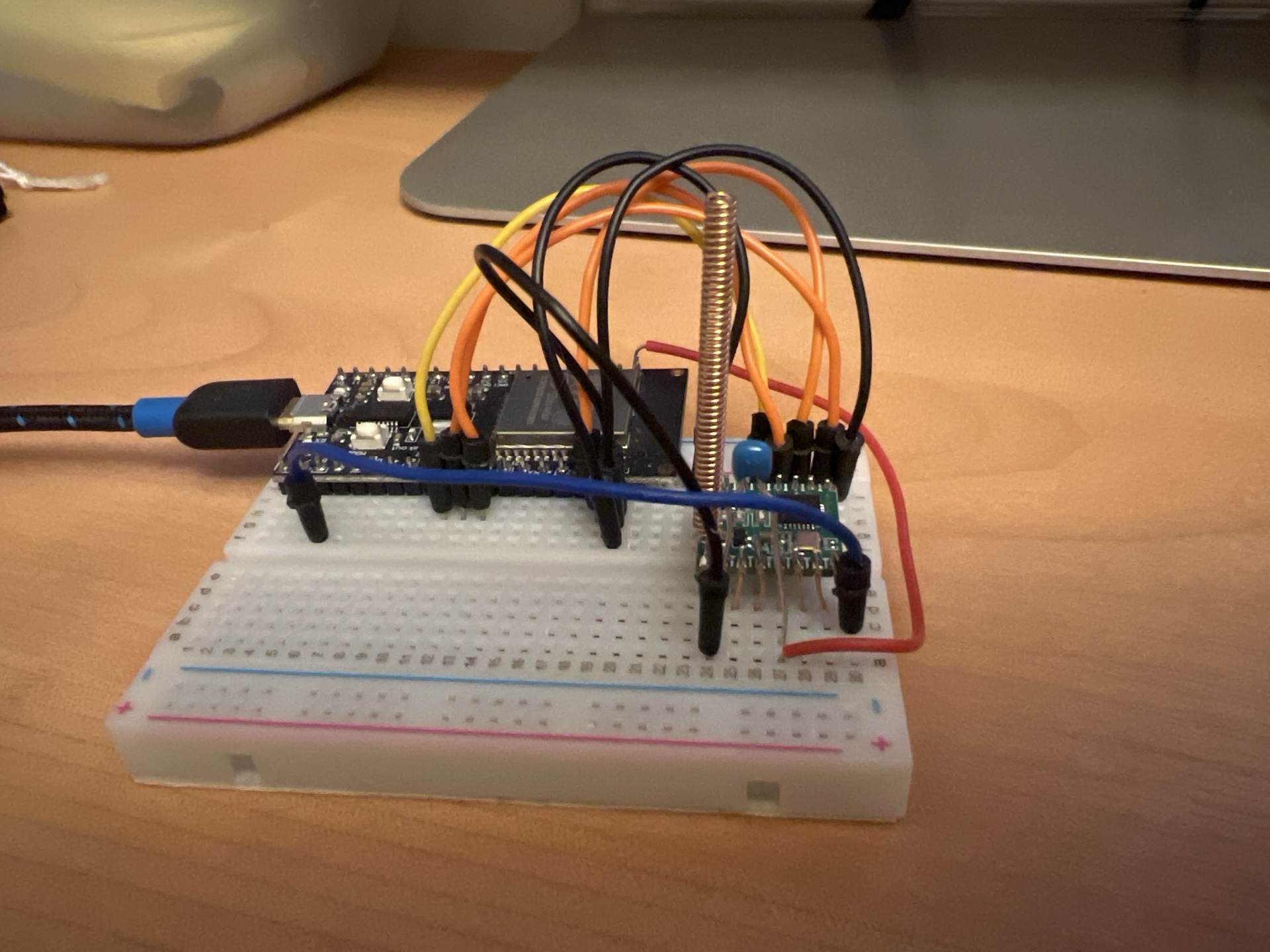 Plaque a essaie utilisée
Plaque a essaie utilisée
Analyse du protocole
Avant de suivre “bêtement” d’autres projets sur le net pour piloter des volets roulant Somfy RTS, je cherche dans un premier temps à analyser et comprendre le protocole Somfy.
Pour ce faire, je me suis mis à l’implémentration d’un “sniffer” de trame Somfy. Je ne suis pas partie de la page blanche et je me suis inspiré par les exmplications du protocole faite par PushStack.
J’ai vraiement bien galéré sur le bon paramétrage du module RFM69HCW en mode réception OOK… Et la datasheet n’est pas super explicite sur la manière d’utiliser ce mode (Et il faut l’avouer, je n’y connais rien en radiofréquences ![]() ).
).
Paramétrage du module RFM69HCW
Afin de procéder au paramétrage du module, j’ai effectué de nombreux essais de paramétrages différents. J4ai donc procédé de manière très empirique vu que mes connaissances en radiofréquence sont proches de zéro.
Voici donc le paramétrage fonctionnel chez moi pour intercepter correctement les signaux de toutes mes télécommandes (même si elles sont situées aux 4 coins de la maison) :
-
SPI
Le module RFM69HCW se configure via SPI. Rien de bien méchant car c’est plutôt standard :
- SPI mode 0 (CPOL=0; CPHA=0)
- Clock speed 5 MHz
- 7 bits d’adresse
- MSB first
Une fois le SPI configuré, j’ai pris le temps de vérifier que la communication avec le RFM69HCW était fonctionnelle en allant lire le registre RegVersion (0x10) permettant de récupérer la version du module. On peu alors vérifier que l’on obtient bien la valeur 0x24 comme spécifier dans la datasheet.
-
Modulation
Il faut configurer le module pour fonctionner en mode continue sans synchronisation en modulation OOK. L’usage de la synchronisation ne fonctionne pas. Mon interprétation est que le signal que l’on cherche à analyser n’a pas de timing “constant”. En effet, avant la partie data qui nous intéresse, il y a des trames avec un timing bien précis à respecter avant l’envoie des data. Ce timing n’étant pas le même que la data, la synchronisation ne peut pas se faire.
Données du registre RegDataModul (0x02) :
Bits Valeur Signification 7 - Non utilisé 6-5 11 Mode continue sans bit de synchronisation 4-3 01 Typoe de modulation OOK 2 - Non utilisé 1-0 00 Pas de shaping Je n’ai aucune idée de ce qu’est le shaping et son utilité. En tout cas, je n’ai constaté aucune différence en l’activant ni même entre les différents shaping possibles.
-
Bitrate
La datasheet n’est pas super claire sur le fonctionnement de ce paramètre. Après avoir fait quelques recherche sur internet, il semble que ce paramètre défini la “vitesse” de lecture des impulsions.
J’ai fait quelques tests empiriques, et je constate qu’avec un bitrate trop bas, je perd des impulsions :
 Bitrate trop bas : Certains fronts montant/descendant sont perdus
Bitrate trop bas : Certains fronts montant/descendant sont perdusAvec un bitrate très élevé, j’ai l’impression d’avoir plusieurs impulsions “en trop” :
 Bitrate trop élevé : Détections de fronts montant/descendant non désirés
Bitrate trop élevé : Détections de fronts montant/descendant non désirésMalgré tous mes essais en faisant varier ce paramètre, je n’arrivais pas avoir des résultats satisfaisant jusqu’à ce que je modifie le paramètre de bande passante (Bandwith). La modification de la bande passante a complètement changé la donne et m’a permis d’avoir des résultats bien meilleurs et plus stables (Cf. Point qui suit).
Toujours d’après mes lectures, il semble qu’utiliser un bitrate plus élevé que les impulsions s’appelle de l’oversampling.
D’après l’analyse de PushStack, un bit est transmis en $604\,\mu s$; soit un biterate de $\frac{1}{604 \times 10^{-6}} \approx 1655\,bits/s$. En utilisant ce bitrate, mes lectures sont plutôt correctes
 . D’ailleurs il doit y avoir des tolérances importantes car il faut un bitrate inférieur à $1000\,bits/s$ pour que je commence à constater des pertes d’impulsions, ou alors un bitrate supérieur à $2500\,bits/s$ pour que je commence à constater l’apparition de glitchs.
. D’ailleurs il doit y avoir des tolérances importantes car il faut un bitrate inférieur à $1000\,bits/s$ pour que je commence à constater des pertes d’impulsions, ou alors un bitrate supérieur à $2500\,bits/s$ pour que je commence à constater l’apparition de glitchs.La datasheet indique qu’il faut appliquer la formule suivante pour déterminer la valeur des registres RegBitrateMsb (0x03) et RegBitrateLsb (0x04) : \(\frac{F_{XOSC}}{BitRate}\).
\(F_{XOSC}\) vaut \(32\,MHz\), donc la valeure des registre doit être fixée à \(\frac{32 \times 10^{6}}{1655} \approx 19335\).
En binaire sur 16 bits, \(19335 = 0100\;1011\;1000\;0111\) (ou 0x4B87 en hexa).
On obtient donc pour le registre RegBitrateMsb (0x03) :
Bits Valeur Signification 7-0 0100 1011 (ou 0x4B) MSB de la valeur du bitrate Et pour le registre RegBitrateLsb (0x04) :
Bits Valeur Signification 7-0 1000 0111 (ou 0x87) LSB de la valeur du bitrate -
Bandwith de réception
Pour ce paramètre, j’ai testé de manière empirique les valeurs proposées dans la datasheet (Table 14). J’ai eu de très bons résultats avec la valeur 31.3 kHz (Modulation OOK).
En revanche, j’ai eu de mauvais résultats en utilisant une largeur de bande plus basse comme par exemple avec la valeur par défaut de 5.2 kHz.
Après avoir fixé cette valeur, une seule de mes télécommande sur les 9 n’est pas bien reconnue.
Données du registre RegRxBw (0x19) :
Bits Valeur Signification 7-5 010 DCC (Cut-off frequency) 4-3 00 Channel filter bandwidth control (00 -> RxBwMant = 16) 2-0 011 31.3 kHz -
OOK Peak & Fix threshold
De ma compréhension, ce paramètre permet de définir le seuil de détection des modulations OOK.
Mes essais en mode “fixed” n’ont jamais été concluant :
- Soit je me retrouve avec pleins de parasides si le threshold est bas (moins de 10 dB)
- Soit certains fronts montant ou descendant sont perdus si le threshold est trop haut (au dela de 30 dB)
- A 20 dB j’ai périodiquement quelques parasites ou quelques fausses lectures
De même avec le mode “average” où j’ai tout le temps de la friture sur la ligne.
Le seul type de seuil que j’arrive à faire marcher c’est le type “peak”. J’ai adapté la période de décrément à une fois tous les 8 “chips”, ce qui a permis à ce que j’arrive à “sniffer” TOUTES mes télécommandes !

Données du registre RegOokPeak (0x1B) :
Bits Valeur Signification 7-6 01 threshold type “peak” 5-3 000 Taille du décrément à 0,5 dB 2-0 011 Périod du décrément à “once every 8 chip” Pour une raison que j’ignore, l’alimentation du registre “RegOokFix” change le comportement de la réception même si l’on est en threshold type “peak”.
Dans mon cas, les meilleurs résultats ont été obtenus en fixant le registre “RegOokFix” (0x1D) à une valeur de 30 dB.
Données du registre RegOokFix (0x1E) :
Bits Valeur Signification 7-0 00011110 (0x1E) Seuil du mode “fixed” en dB (0x1E = 30 dB) -
Fréquence
La fréquence à utiliser pour communiquer avec les volets Somfy est de \(433,42\,MHz\).
La datasheet indique la formule à suivre pour alimenter lees registres RegFrfMsb (0x07), RegFrfMid (0x08) et RegFrfLsb (0x09). Il faut au préalable connaitre la fréquence du synthétiseur. Une nouvelle fois la datasheet nous indique comment calculer sa valeur : \(F_{step} = \frac{F_{XOSC}}{2^{19}}\).
\(F_{XOSC}\) vaut \(32\,MHz\), donc la valeure de \(F_{step} = \frac{32 \times 10^{6}}{2^{19}} \approx 61 Hz\).
A partir de là, il ne reste qu’à déterminer la valeur du registre à positionner, soit, toujours d’après la datasheet : \(F_{rf} = \frac{433,42 \times 10^{6}}{F_{step}} \approx 7105245\).
En binaire sur 24 bits, \(7105245 = 0110\;1100\;0110\;1010\;1101\;1101\) (ou 0x6C6ADD en hexa).
Données du registre RegFrfMsb (0x07) :
Bits Valeur Signification 7-0 01101100 (0x6C) MSB de la fréquence Données du registre RegFrfMid (0x08) :
Bits Valeur Signification 7-0 01101010 (0x6A) Octet central de la fréquence Données du registre RegFrfLsb (0x09) :
Bits Valeur Signification 7-0 11011101 (0xDD) LSB de la fréquence -
Mode haute sensibilité
J’active également le mode haute sensibilité.
Données du registre RegTestLna (0x58) :
Bits Valeur Signification 7-0 00101101 (0x2D) High sensitivity mode -
Calibration
Pour la gloire de la horde, j’effectue aussi une calibration de l’oscillateur (mais je doute fort que celà est un impacte important sur la lecture).
Je positionne donc le bit n°7 du registre “RegOsc1” (0x0A) permettant de déclancher la calibration de l’oscillateur (ATTENTION : Cette calibration ne peut se faire qu’en mode standby).
Puis, j’attends patiemment que le bit n°6 de ce même registre soit positionné à 1. Cela indique que la calibration est terminée.
-
Activation de la réception (mode RX)
Enfin, j’active le module en mode réception. Pour celà, il suffit de positionner les bits n°4 à 2 avec la valeur 0b100.
Puis, j’attends que le bit n°7 du registre “RegIrqFlags1” (0x27) soit positionné à 1. Cela indique que le module a bien fini de basculer dans le mode de fonctionnement demandé.
Paramétrage de mon analyseur logique
Malgré la mise en place de tout ce paramétrage, j’ai été obligé d’utiliser mon petit analyseur logique pour pouvoir visualiser les trames du module RFM69HCW…
Voici la configuration qui marche chez moi avec mon analyseur logique :
- Mode : Manchester
- Bit rate : 780 bits/s
- Edge polarity : negative edge is binary zero
- Bits per Frame : 8
- Significant bit : MSB first
- Preamble bits to ignore : 1
- Tolérance : 25% de la période
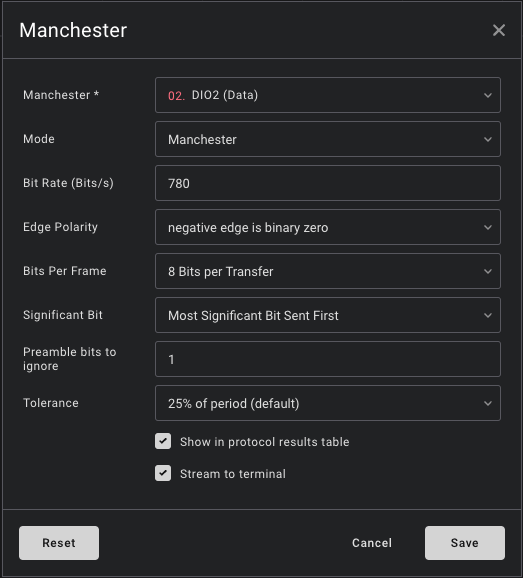 Configuration de mon analyseur logique
Configuration de mon analyseur logique
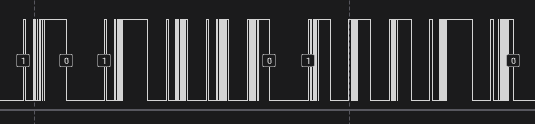
Et là, bingo, tout est nikel :
 Exemple de trame lue
Exemple de trame lue
Interprétation d’une trame
Maintenant que l’on arrive à récupérer une trame bien propre, je me suis atelé au décodage de celle-ci.
Pour le coup, les travaux de PushStack sont très bien et je n’ai que peu de chose à ajouter si ce n’est que chez moi je constate des timing toujours un peu plus long que les siens.
Quelques exemples :
- L’impulsion de “wakeup” est plutôt de l’ordre de 10,4ms chez moi
- Les impulsions de “hw.sync.” sont plutot de l’ordre de 2,6ms
- Les symboles ont une impusion d’environ 1300/1350us
Il est tout a fait plausible que ces écarts soient liés aux télécommandes que j’ai utilisée. D’ailleurs, les temps que je constate sont souvent différents d’une télécommande à une autre.
Code de lecture d’une trame
Concernant le code pour lire une trame SomfyRTS, il suffit d’aller sur mon repo GitHub.
La suite…
Pour la suite de ce projet, je prévois :
- Un bon coup de refactoring de code et créer ma propre library pour le RFM69
- Faire un crictuit temporaire me permettant de tester l’émission d’une trame (et donc piloter pour de vrai un volet)
- Trouver un écran tactile et trouver comment l’utiliser avec un ESP32
- Coder une petite interface pour pouvoir gérer mes volets depuis ce futur boitier
- Créer un circuit imprimé avec tout ce beau monde
- Créer un beau boitier pour tout mettre dedans
Liens externes et documentations
Documentations générales des Volets roulant Somfy.
Explication du protocole Somfy RTS.
Exemple de bibliothèque C++ pour coder une librairy dédiée au RFM69HCW.
Usage de ce projet pour extraire le bon réglage du module.
Documentation sur la Démodulation OOK.